Edit: I am soon going to a writeup on the rendering. I wrote this post in haste so have not gotten a chance to write much yet but in as few words as possible the new rendering is much faster because it only calculates visible surfaces instead of volumes. It is based on cell marching and distance field marching. More info to come soon!
Since the last update:
I have been fairly busy with "real life" issues, which seems to be the norm these days, but I have managed to get quite a bit done regardless.
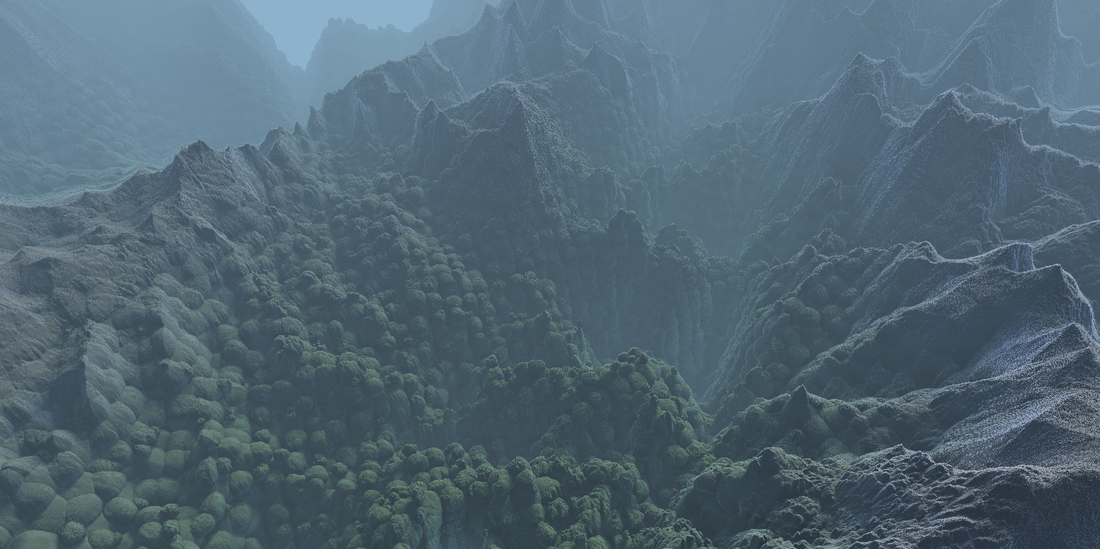
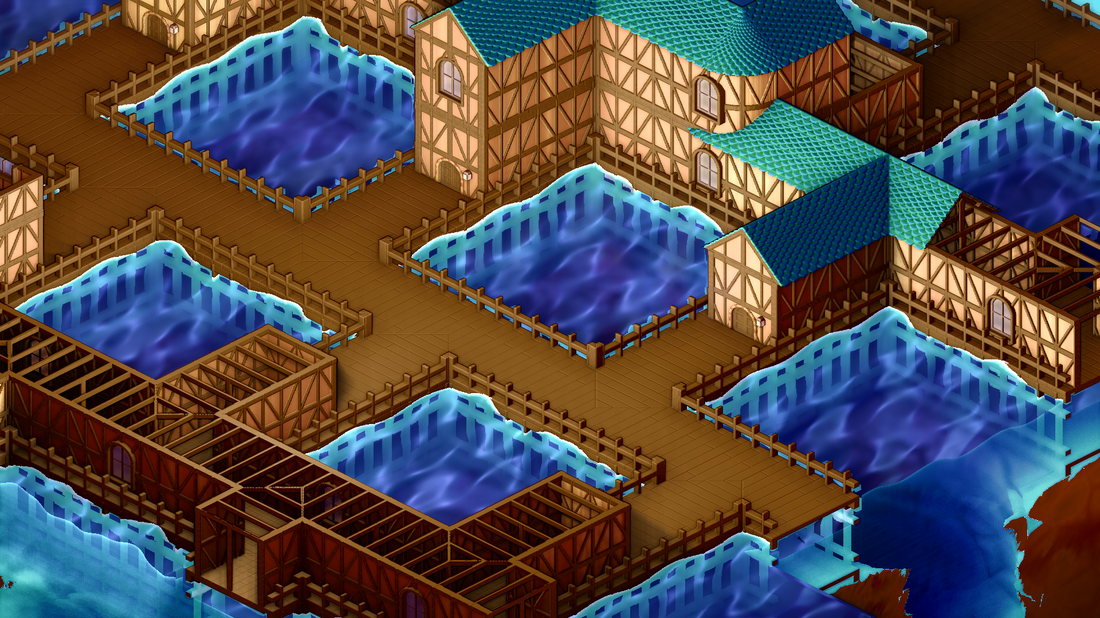
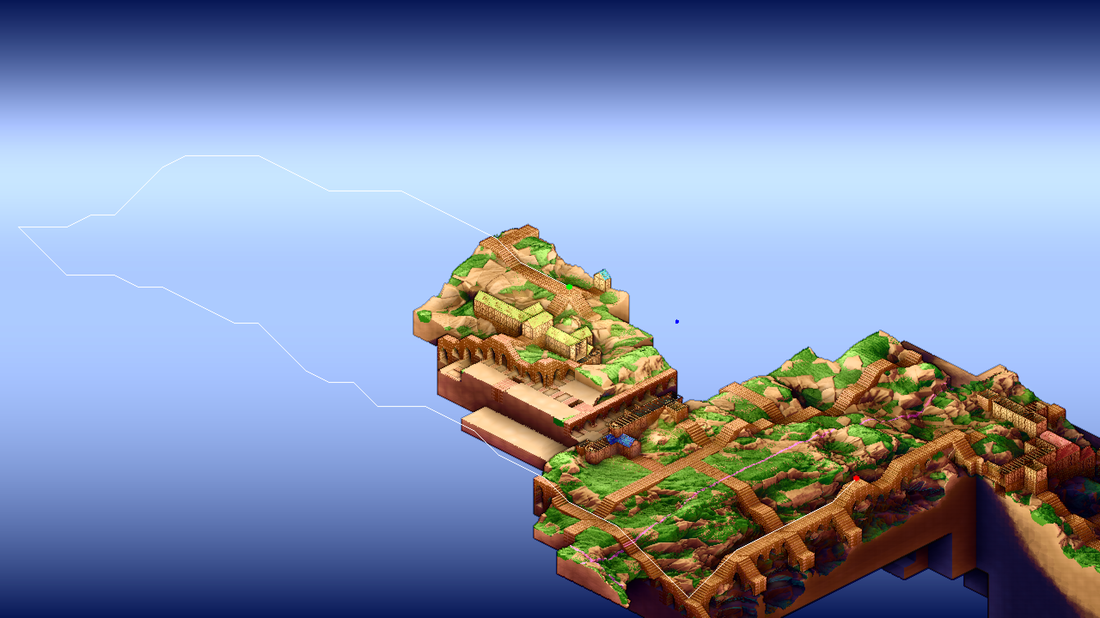
Below is one of the earlier tests I put together - rendering terrain based on VQ's generated map.
Since the last update:
- Implemented an entirely new ray-based rendering method which includes such benefits as...
- No more chunk loading. All scene data appears instantly
- No more refreshing of chunks. Changes can occur in realtime, at 60+ FPS.
- Vastly Increased performance and draw distance.
- "Infinite detail" (limited only by floating point precision and algorithmic complexity).
- Ability to dynamically animate any surface or object.
- Successfully integrated with much of the old pipeline which optionally includes various screen-space effects, material rendering, and so forth.
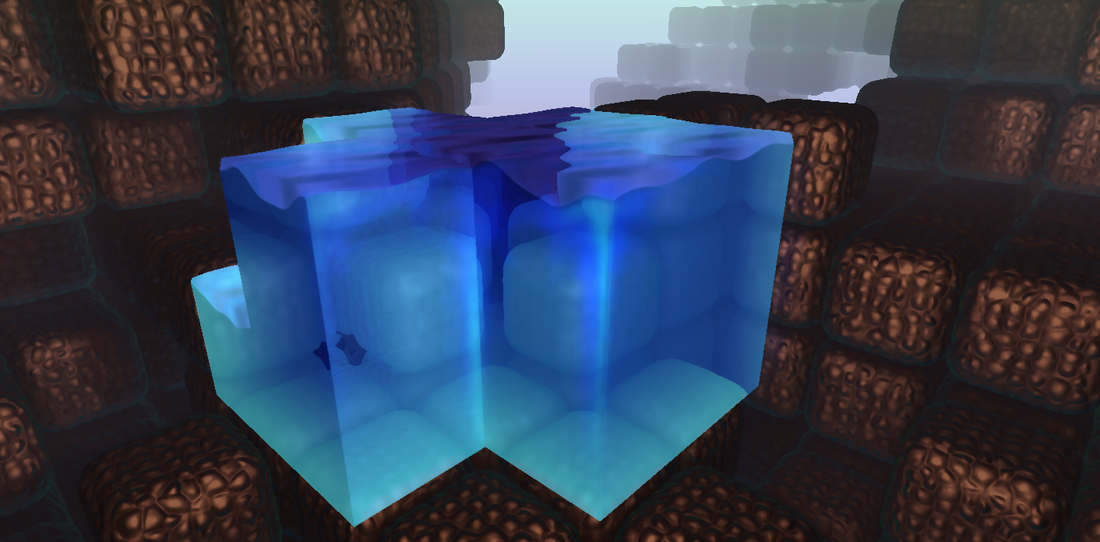
- I also implemented complex fluid dynamics, which include such features as...
- Constant fluid volume (impossible to destroy matter (unless intended)). Fluids maintain correct proximity and do not lose or gain water.
- Water pressure. Fluids will balance out (i.e. fill a U-bend evenly) and simulate correct pressure and distribution.
- Free of most artifacts but still needs work. Particularly notable is that the water does not jitter around as it does in many constant fluid simulations.
I have been fairly busy with "real life" issues, which seems to be the norm these days, but I have managed to get quite a bit done regardless.
Below is one of the earlier tests I put together - rendering terrain based on VQ's generated map.
Fluid works quite well now. Constant volume, pressure, multithreaded, 2 mil units. #gamedev pic.twitter.com/mYUoF9L9wj
— Gavan Woolery (@gavanw) May 20, 2015
Added in bilinear filtering to smooth out the water (sorry for all the twitter embeds, I am lazy):
Added bilinear filtering and HOLY $@#?%! #gamedev pic.twitter.com/DIc7KnDFBR
— Gavan Woolery (@gavanw) May 20, 2015
And one more demo of the smooth water:
cc voxel peeps @atomontage_com @Data01 @bartwerf @JonOlick @lexaloffle @rianflo @paniq @ephtracy etc :) pic.twitter.com/r9bgxbbYNx
— Gavan Woolery (@gavanw) May 20, 2015






 RSS Feed
RSS Feed